Overview
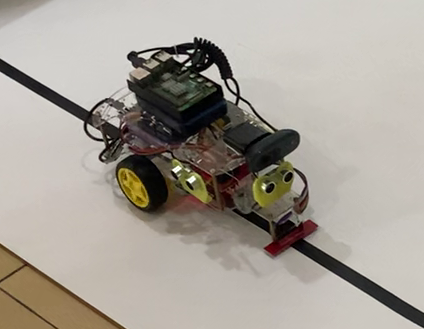
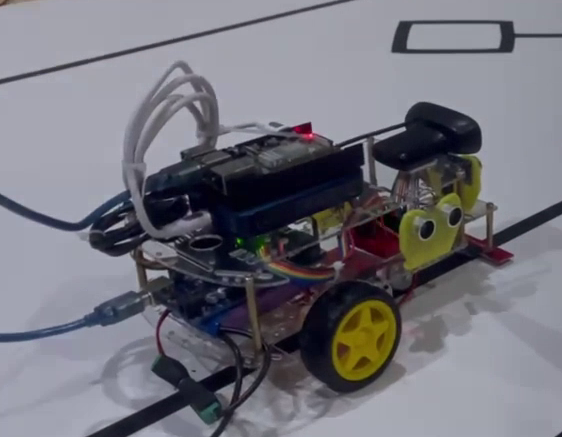
This project delivers an indoor navigation robot that follows a black path using an 8-IR PID controller, avoids obstacles with ultrasonic sensing, and executes junction turns from a hybrid sign-recognition pipeline. Symbolic signs (BUS STOP, TRAIN, PARKING) are classified on the Raspberry Pi using a Random Forest model with HOG+HSV features, while numeric speed signs (20, 100) are read by EasyOCR from red circular ROIs. Parallel RF and OCR detections are fused to stabilize results, triggering pause/stop events and guiding left/straight/right decisions at the 4-way junction. Modes include manual, line follow, and obstacle-assist, with wall following engaged when the line is lost. A Bluetooth-based Android app provides manual controls (forward, back, left, right, stop), speed adjustment, destination selection, and mode switching through a simple GUI, enabling seamless human-robot interaction
Demo Video
Skills Involved
- PID line following with 8-IR sensors
- RF (HOG+HSV) for symbolic signs, EasyOCR for speed signs
- Parallel vision threads with debouncing
- Ultrasonic sensing for obstacles and wall following
- Embedded control via Raspberry Pi + Arduino
- Bluetooth app for driving, speed, destination, and modes