
Overview
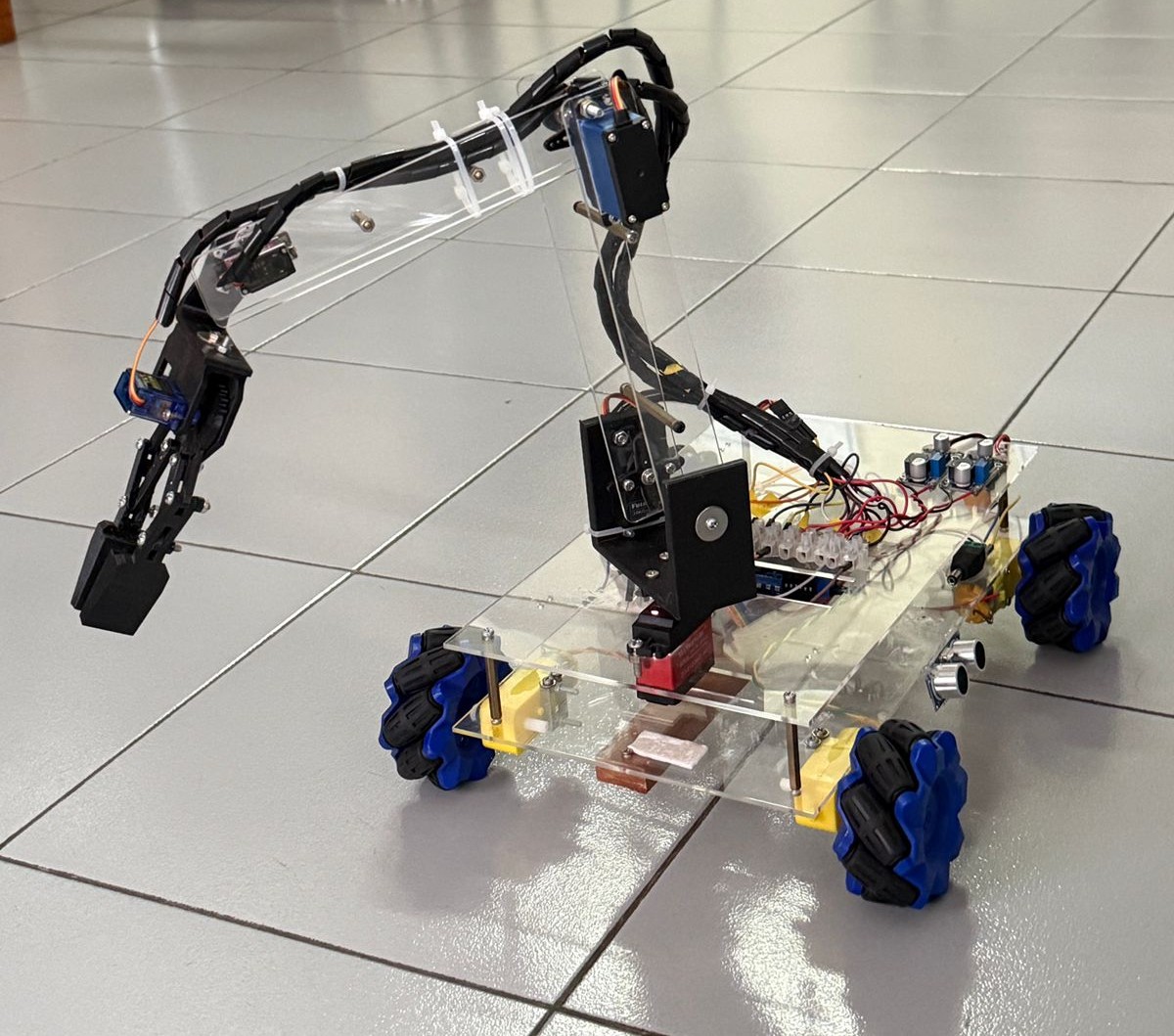
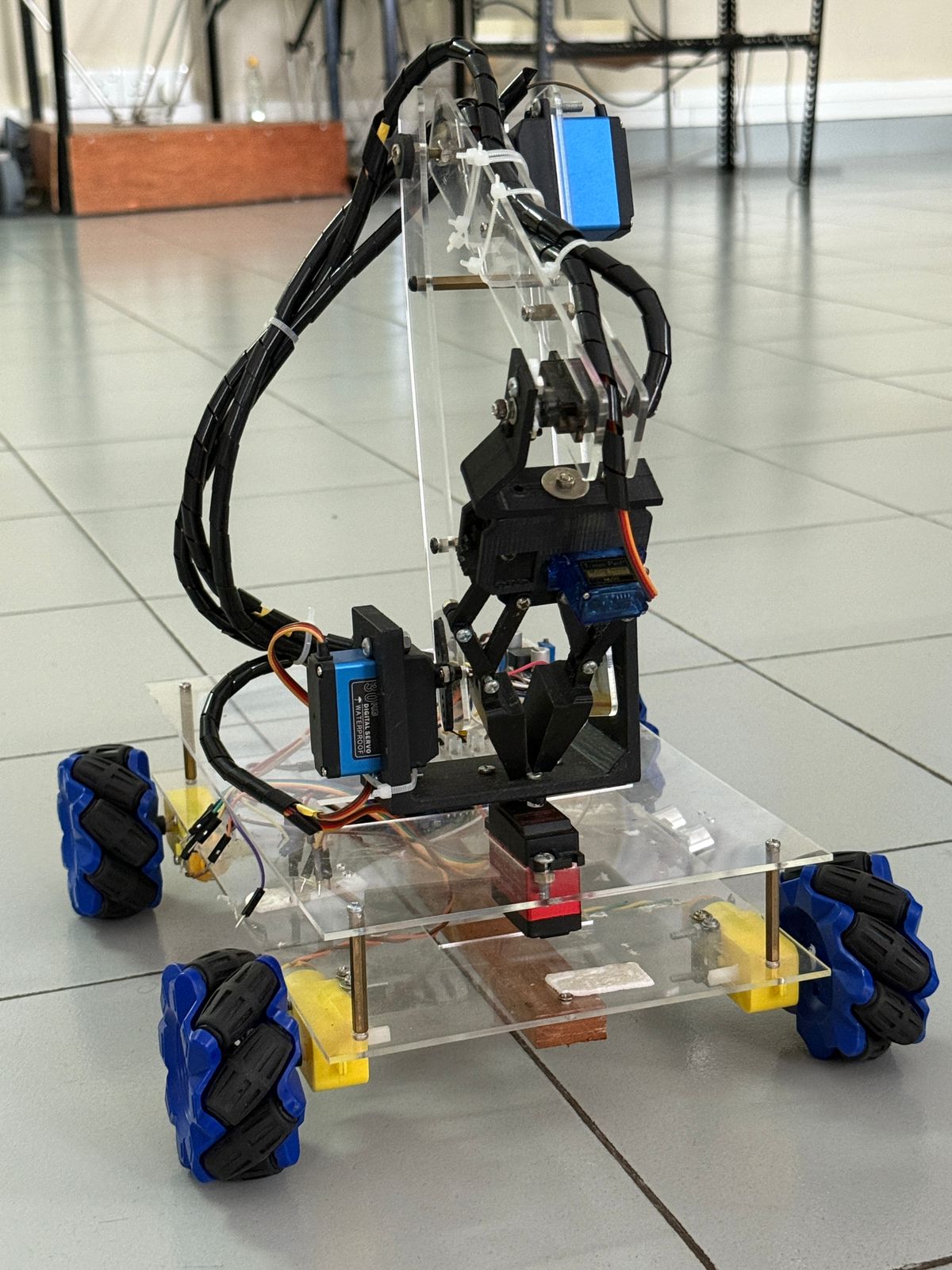
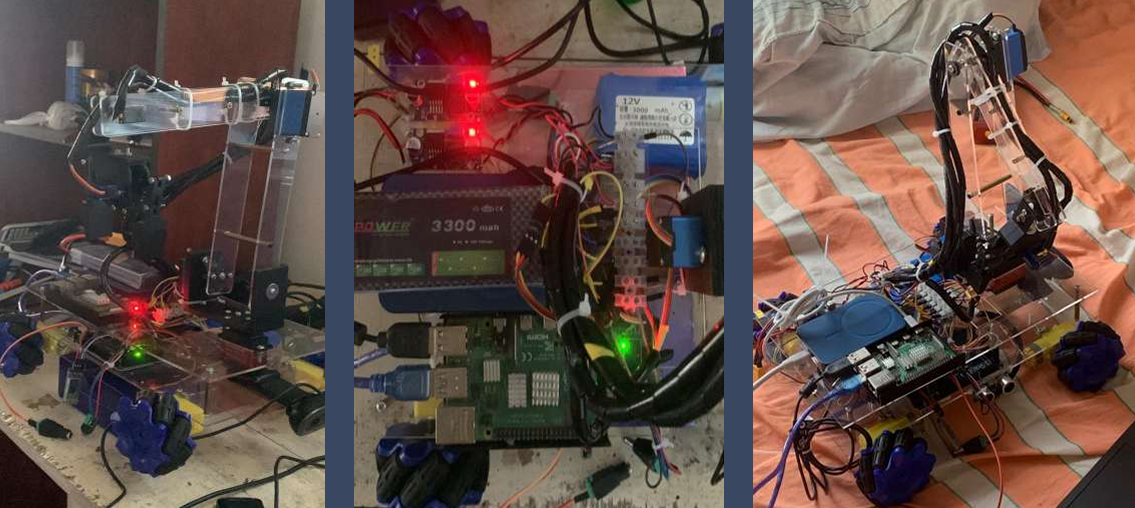
This project develops a compact warehouse mobile manipulator that combines an omnidirectional mecanum-drive base with a 4-DoF rotary arm for autonomous pick-and-place in objects. The arm provides an effective workspace of approximately 0.5 m³ with a 2 kg payload, supported by detailed kinematic modeling, workspace analysis, and motor torque sizing. Structural links were topology-optimized to increase stiffness-to-weight ratio while meeting deflection and safety constraints.
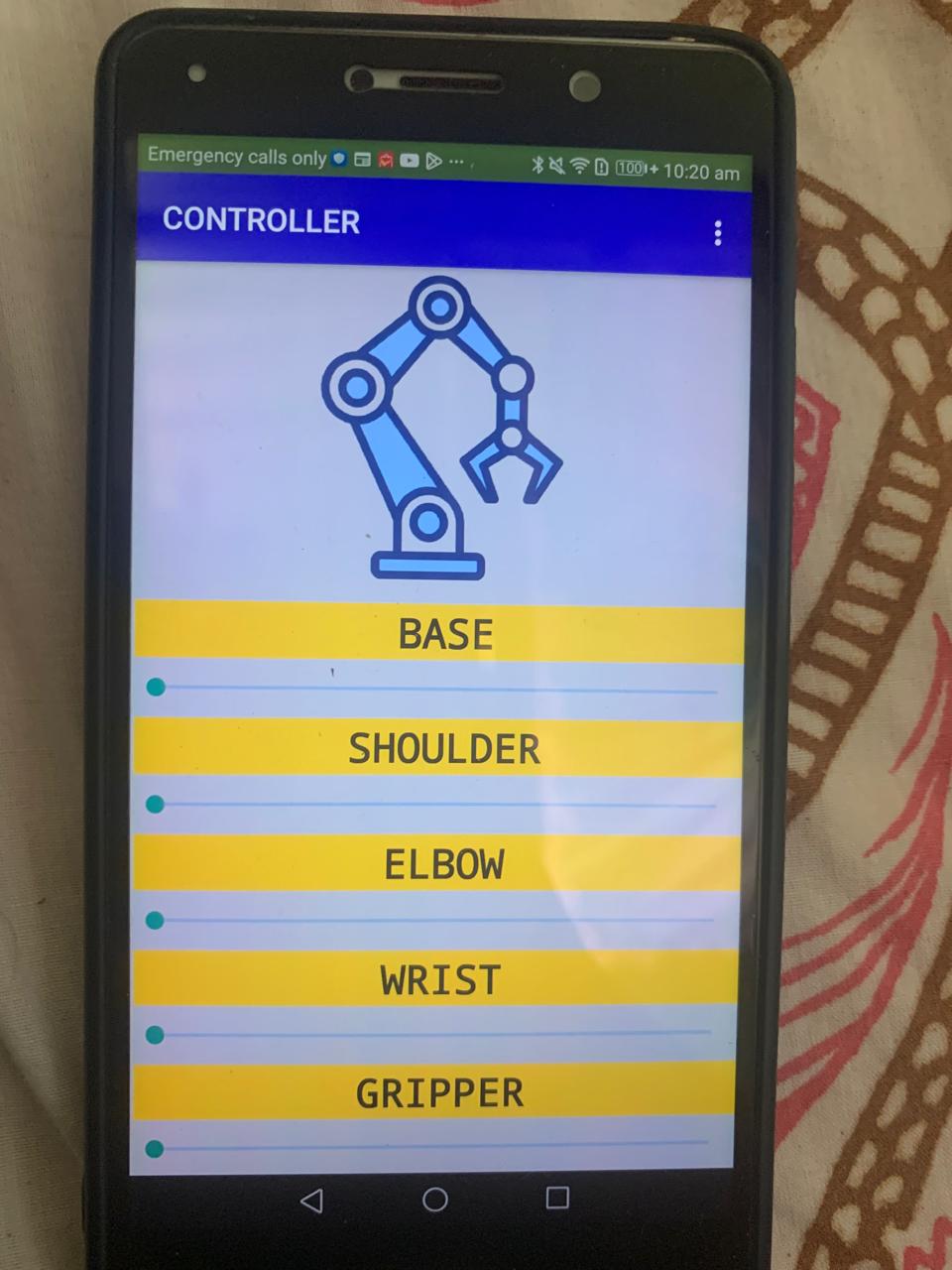
Depth-aware perception enables object detection and grasp planning through calibrated cameras and color/geometry-based filtering. The platform integrates IKPy for inverse kinematics and provides a web/mobile UI for teleoperation and task monitoring. The validation process included simulation, benchtop actuation, and integrated prototype trials, demonstrating reliable manipulation and maneuverability for logistics workflows.
Demo Video
Skills Involved
- Kinematic modeling & analysis (forward/inverse kinematics of 4-DoF arm)
- Workspace definition and validation (MATLAB; Peter Corke toolbox)
- Motor torque estimation, topology optimization, and structural validation (SolidWorks, Adams, Ansys)
- Mecanum kinematics & omnidirectional control
- Depth perception & object detection (camera calibration, HSV/geometry filtering)
- Inverse kinematics with IKPy for real-time manipulator control
- Simulation and validation using Gazebo & RViz
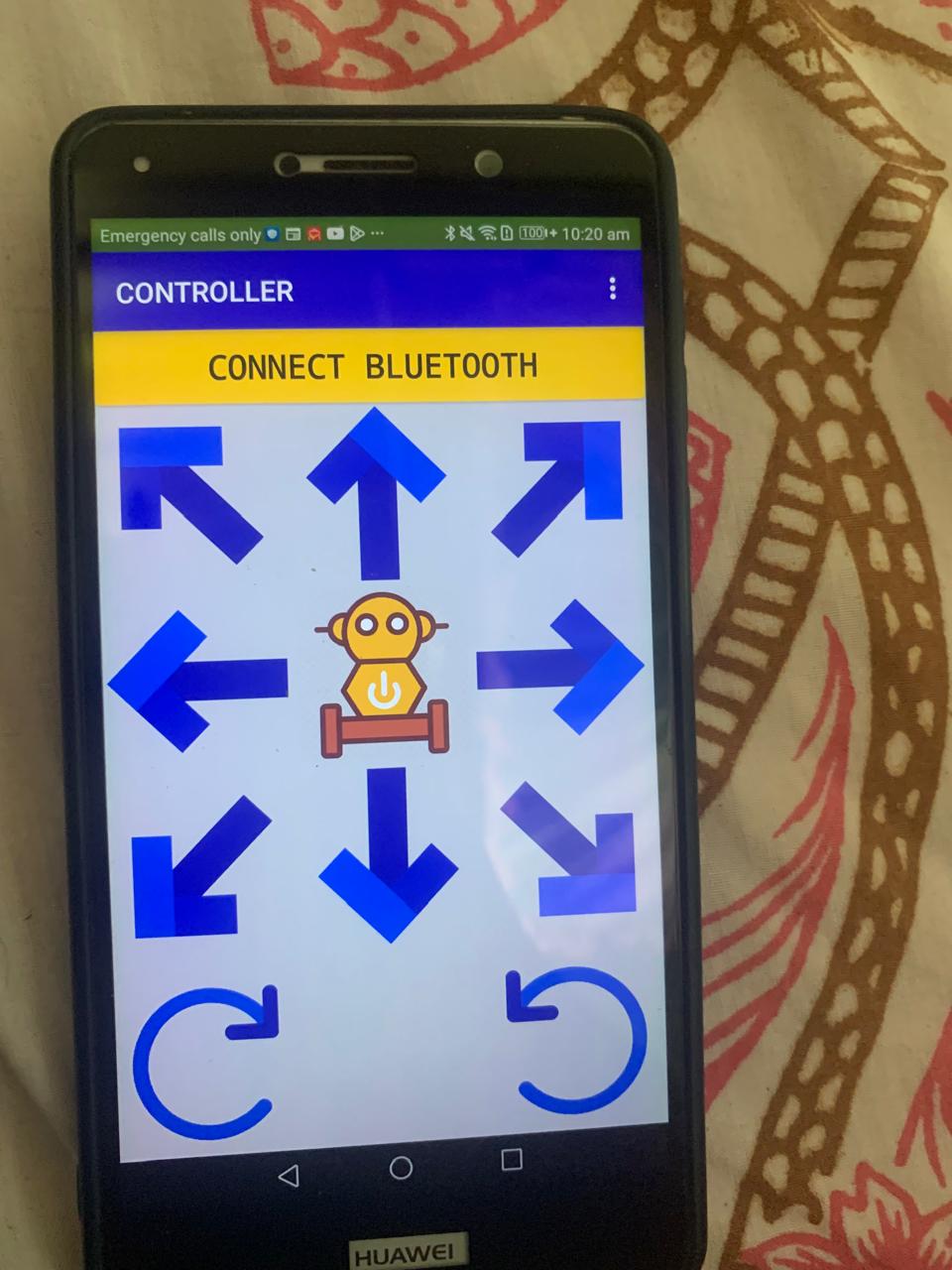
- Web/mobile applications for teleoperation & monitoring
- Prototype fabrication with 3D printing and laser cutting
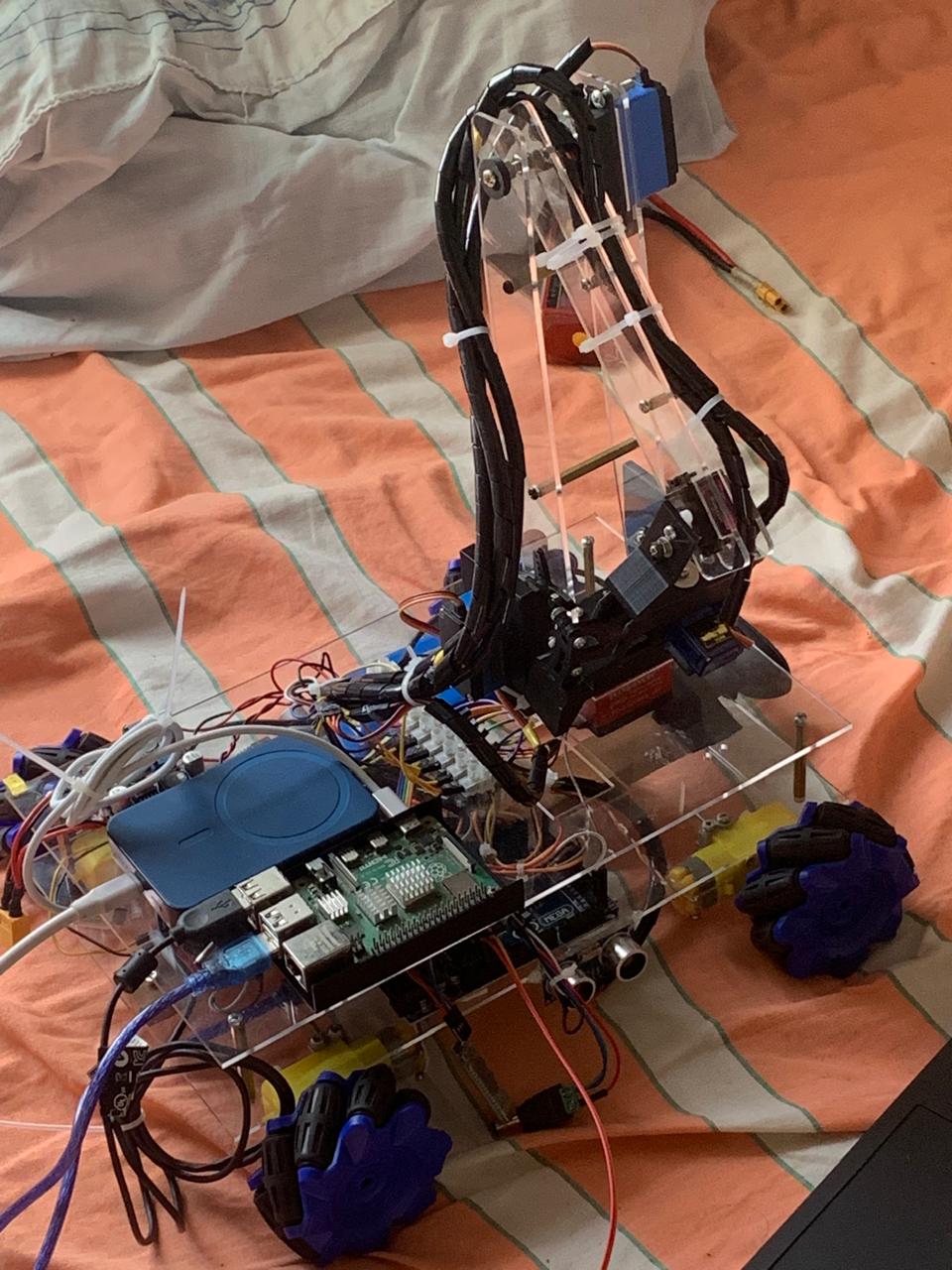
- System integration: Raspberry Pi + Arduino-based control with camera & ultrasonic sensors